本文共 14514 字,大约阅读时间需要 48 分钟。
爱,就能使一个人到如此的地步。一次邂逅,一次目光的交融,就是永远的合二为一,就是与上帝的契约;纵使风暴雷电,也无法分解这种心灵的粘合。
文章目录
2020年05月03日更:6ULL的GPIO子系统还不太完善,GPIO_ACTIVE_LOW没有效果,读到的实际值,并不是逻辑值!
总结:pinctrl 子系统重点是设置 PIN的复用和电气属性; gpio 子系统用于初始化 GPIO 并且提供相应的 API 函数如设置 GPIO为输入输出,读取 GPIO 的值等。
前面的几节,直接使用操作寄存器的方法编写驱动。这只是为了更好掌握驱动程序的本质,在实际开发过程中可不这样做,太低效了!如果驱动开发都是这样去查找寄存器,那我们就变成“寄存器工程师”了,即使是做单片机的都不执着于裸写寄存器了。
一、Pinctrl 子系统
1.1 引入
无论是哪种芯片,都有类似下图的结构:
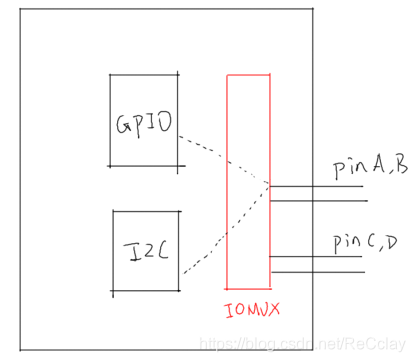
所以,要把引脚的复用、配置抽出来,做成 Pinctrl 子系统,给 GPIO、 I2C 等模块使用。BSP 工程师要做什么? 看下图:

等等, GPIO 模块在图中跟 I2C 不是并列的吗?干嘛在讲 Pinctrl 时还把 GPIO 子系统拉进来?大多数的芯片,没有单独的 IOMUX 模块,引脚的复用、配置等等,就是在 GPIO 模块内部实现的。在硬件上 GPIO 和 Pinctrl 是如此密切相关,在软件上它们的关系也非常密切。所以这 2 个子系统要一起讲解。
1.2 重要概念
从设备树开始学习 Pintrl 会比较容易,主要参考文档是:内核 Documentation\devicetree\bindings\pinctrl\pinctrl-bindings.txt
这会涉及 2 个对象: pin controller、 client device。前者提供服务:可以用它来复用引脚、配置引脚。后者使用服务:声明自己要使用哪些引脚的哪些功能,怎么配置它们。
-
A) pin controller
- 在芯片手册里你找不到 pin controller,它是一个软件上的概念,你可以认为它对应IOMUX──用来复用引脚,还可以配置引脚(比如上下拉电阻等)。
- 注意, Pin controller 和 GPIO Controller 不是一回事,前者控制的引脚可用于 GPIO 功能、 I2C 功能;后者只是把引脚配置为输出、输入等简单的功能。
-
B) client device
- “客户设备”,谁的客户? Pinctrl 系统的客户,那就是使用 Pinctrl 系统的设备,使用引脚的设备。它在设备树里会被定义为一个节点,在节点里声明要用哪些引脚。
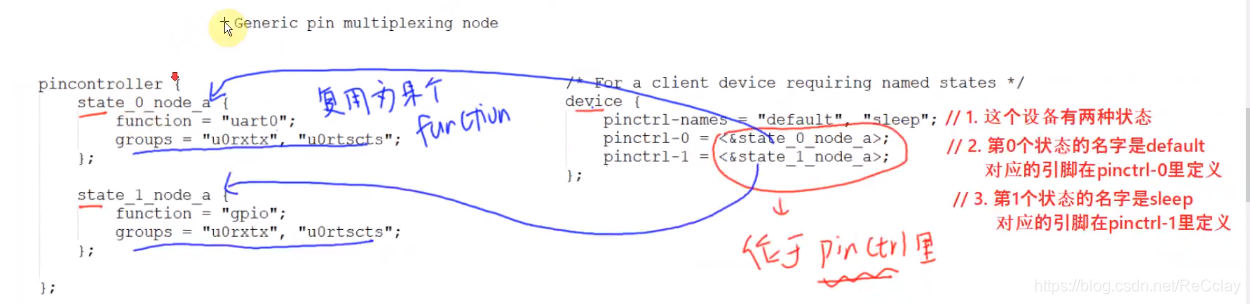
下图就可以把几个重要概念理清楚:
图一:状态0和状态1均称为《复用节点》
 图二:状态0称为《复用节点》,状态1称为《配置节点》
图二:状态0称为《复用节点》,状态1称为《配置节点》 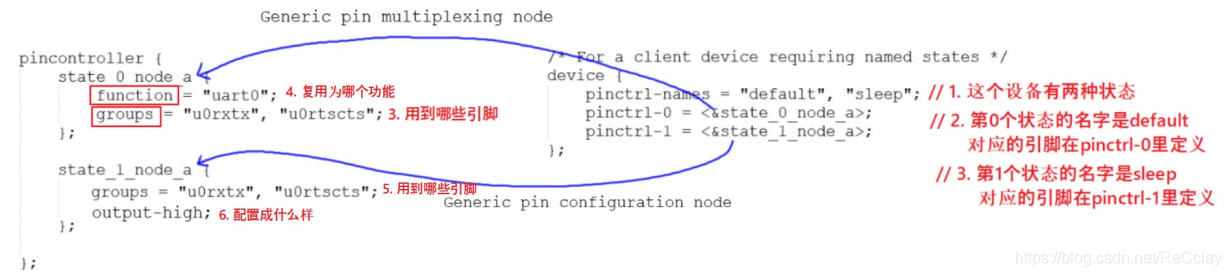 图二中,左边是 pincontroller 节点,右边是 client device 节点:
图二中,左边是 pincontroller 节点,右边是 client device 节点: -
a) pin state
- 对于一个“client device”来说,比如对于一个 UART 设备,它有多个“状态”: default、 sleep等,那对应的引脚也有这些状态。
- 比如默认状态下, UART 设备是工作的,那么所用的引脚就要复用为 UART 功能。
- 在休眠状态下, 为了省电,可以把这些引脚复用为 GPIO 功能;或者直接把它们配置输出高电平。
- 上图中,
pinctrl-names里定义了 2 种状态: default、 sleep。- 第 0 种状态用到的引脚在 pinctrl-0 中定义,它是 state_0_node_a,位于pincontroller 节点中。
- 第 1 种状态用到的引脚在 pinctrl-1 中定义,它是 state_1_node_a,位于 pincontroller 节点中。
- 当这个设备处于 default 状态时, pinctrl 子系统会自动根据上述信息把所用引脚复用为uart0 功能。
- 当这这个设备处于 sleep 状态时, pinctrl 子系统会自动根据上述信息把所用引脚配置为高电平。
- 对于一个“client device”来说,比如对于一个 UART 设备,它有多个“状态”: default、 sleep等,那对应的引脚也有这些状态。
-
b) groups 和 function:
- 一个设备会用到一个或多个引脚,这些引脚就可以归为一组(group);这些引脚可以复用为某个功能: function。
- 当然:一个设备可以用到多组多能引脚,比如 A1、 A2 两组引脚, A1 组复用为 F1 功能, A2组复用为 F2 功能。
-
c) Generic pin multiplexing node 和 Generic pin configuration node
- 在上图左边的 pin controller 节点中,有子节点或孙节点,它们是给 client device 使用的。
- 可以用来描述复用信息:哪组(group)引脚复用为哪个功能(function);
- 可以用来描述配置信息:哪组(group)引脚配置为哪个设置功能(setting),比如上拉、下拉等.
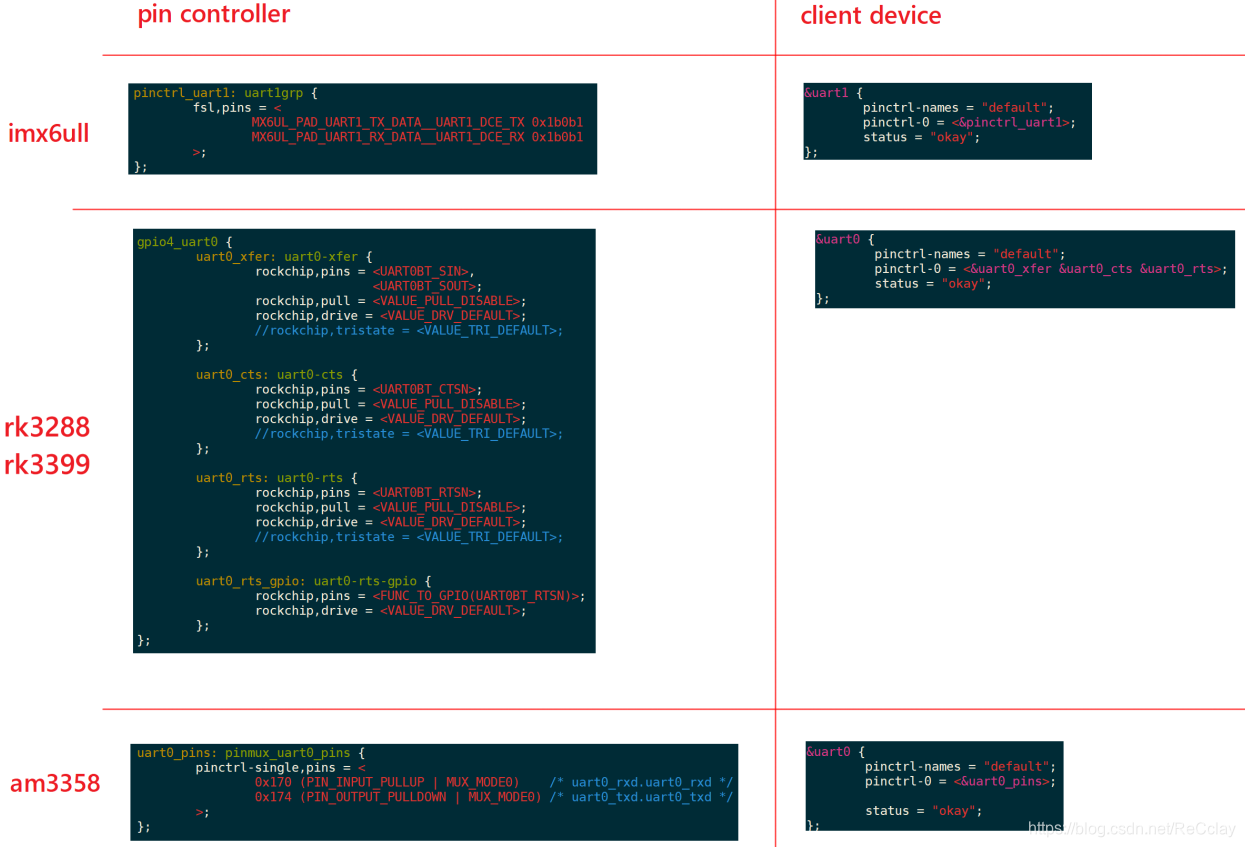
1.3 使用实例
注意: pin controller 节点的格式, 没有统一的标准!(但是《复用节点》和《配置节点》这种概念还是有的)每家芯片都不一样。甚至上面的 group、 function 关键字也不一定有,但是概念是有的。
client device是有固定格式的!(它是写到设备树中的!!)
使用实例如下图。
1.4 代码中怎么引用 pinctrl
关于代码中怎么引用 pinctrl,这是透明的,我们的驱动基本不用管。当设备切换状态时,对应的 pinctrl 就会被调用。比如在 platform_device 和 platform_driver 的枚举过程中,流程如下:

非要自己调用,也有函数:
devm_pinctrl_get_select_default(struct device *dev); // 使用"default"状态的引脚pinctrl_get_select(struct device *dev, const char *name); // 根据 name 选择某种状态的引脚pinctrl_put(struct pinctrl *p); // 不再使用, 退出时调用
二、GPIO 子系统重要概念
2.1 引入
要操作 GPIO 引脚,先把所用引脚配置为 GPIO 功能,这通过 Pinctrl 子系统来实现。然后就可以根据设置引脚方向(输入还是输出)、读值─获得电平状态,写值─输出高低电平。以前我们通过寄存器来操作 GPIO 引脚,即使 LED 驱动程序,对于不同的板子它的代码也完全不同。
当 BSP 工程师实现了 GPIO 子系统后,我们就可以:
- 在设备树里指定 GPIO 引脚(哪一组的哪一个引脚)
- 在驱动代码中:
- 使用 GPIO 子系统的标准函数获得 GPIO、设置 GPIO 方向、读取/设置 GPIO 值。这样的驱动代码,将是单板无关的。
2.2 在设备树中指定引脚
在几乎所有 ARM 芯片中, GPIO 都分为几组,每组中有若干个引脚。 所以在使用 GPIO子系统之前,就要先确定:它是哪组的?组里的哪一个?
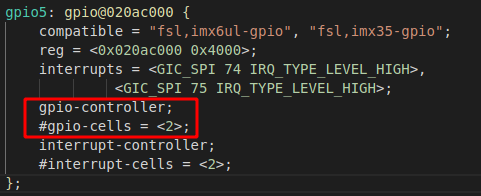
在设备树中,“GPIO 组”就是一个 GPIO Controller,这通常都由芯片厂家设置好。我们要做的是找到它名字,比如“gpio1”,然后指定要用它里面的哪个引脚,比如<&gpio1 0>。
有代码更直观,下图是一些芯片的 GPIO 控制器节点,它们一般都是厂家定义好,在
xxx.dtsi 文件中: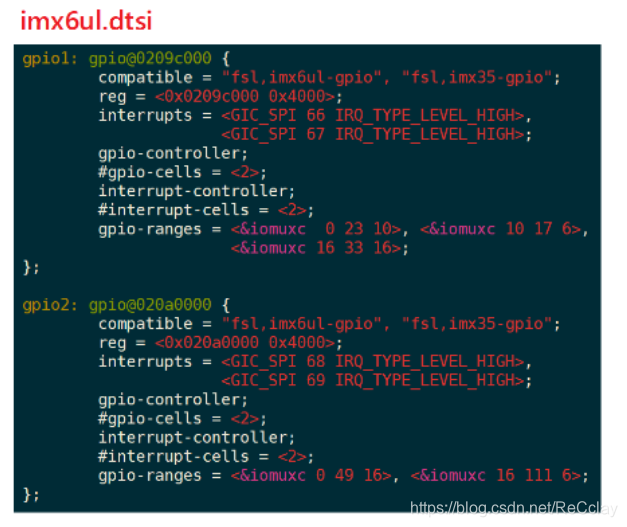
我们暂时只需要关心里面的这 2 个属性:
- gpio-controller;
- 表示这个节点是一个 GPIO Controller,它下面有很多引脚
- #gpio-cells = <2>;
- 表示这个控制器下每一个引脚要用 2 个 32 位的数(cell)来描述(除了第一个参数之外,还需要两个参数描述这个GPIO)。
- 使用多少个 cell 来描述一个引脚,这是 GPIO Controller 自己决定的。比如可以用其中一个 cell 来表示那是哪一个引脚,用另一个 cell 来表示它是高电平有效还是低电平有效,甚至还可以用更多的 cell 来示其他特性。
- 普遍的用法是,用第 1 个 cell 来表示哪一个引脚,用第 2 个 cell 来表示有效电平:
GPIO_ACTIVE_HIGH : 高电平有效GPIO_ACTIVE_LOW : 低电平有效
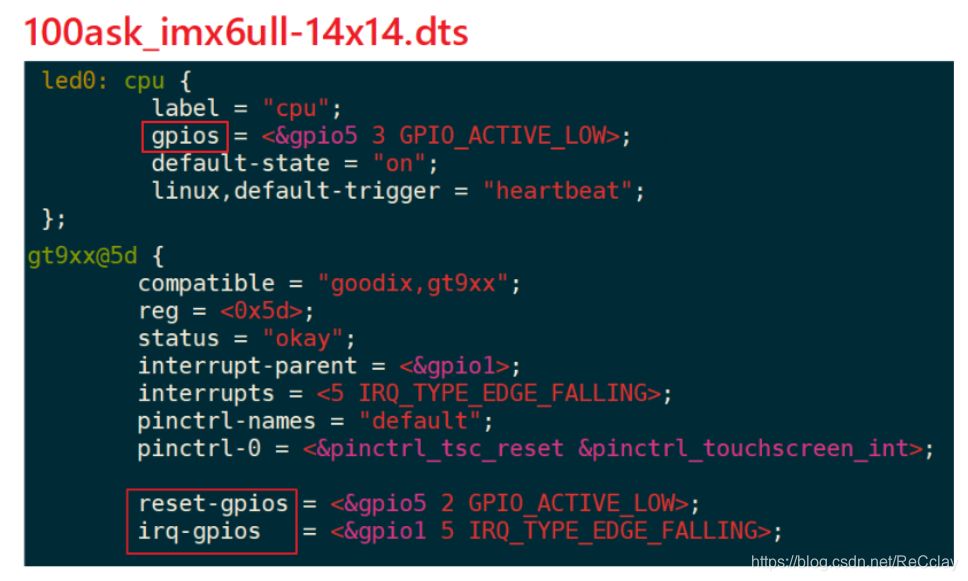
定义 GPIO Controller 是芯片厂家的事,我们怎么引用某个引脚呢?在自己的设备节点中使用属性"[<name>-]gpios",示例如下:
2.3、 在驱动代码中调用 GPIO 子系统
在设备树中指定了 GPIO 引脚,在驱动代码中如何使用?也就是 GPIO 子系统的接口函数是什么?
GPIO 子系统有两套接口: 基于描述符的(descriptor-based)、老的(legacy)。前者的函数都有前缀“gpiod_”,它使用 gpio_desc 结构体来表示一个引脚;后者的函数都有前缀“gpio_”,它使用一个整数来表示一个引脚。
要操作一个引脚,首先要 get 引脚,然后设置方向,读值、写值。
驱动程序中使用不同的GPIO子系统接口要包含不同的头文件:
#include// descriptor-based或#include // legacy
下表列出常用的函数:
| descriptor-based | legacy |
|---|---|
| 获得 GPIO | 获得 GPIO |
| gpiod_get | gpio_request |
| gpiod_get_index | |
| gpiod_get_array | gpio_request_array |
| devm_gpiod_get | |
| devm_gpiod_get_index | |
| devm_gpiod_get_array | |
| 设置方向 | 设置方向 |
| gpiod_direction_input | gpio_direction_input |
| gpiod_direction_output | gpio_direction_output |
| 读值、写值 | 读值、写值 |
| gpiod_get_value | gpio_get_value |
| gpiod_set_value | gpio_set_value |
| 释放 GPIO | 释放 GPIO |
| gpio_free | gpio_free |
| gpiod_put | gpio_free_array |
| gpiod_put_array | |
| devm_gpiod_put | |
| devm_gpiod_put_array |
有前缀“devm_”的含义是“设备资源管理”(Managed Device Resource),这是一种自动释放资源的机制。它的思想是“资源是属于设备的,设备不存在时资源就可以自动释放”。
比如在 Linux 开发过程中,先申请了 GPIO,再申请内存;如果内存申请失败,那么在返回之前就需要先释放 GPIO 资源。如果使用 devm 的相关函数,在内存申请失败时可以直接返回:设备的销毁函数会自动地释放已经申请了的 GPIO 资源。 故,建议使用“devm_”版本的相关函数。举例,假设备在设备树中有如下节点:
foo_device { compatible = "acme,foo"; ... led-gpios = <&gpio 15 GPIO_ACTIVE_HIGH>, /* red */ <&gpio 16 GPIO_ACTIVE_HIGH>, /* green */ <&gpio 17 GPIO_ACTIVE_HIGH>; /* blue */ power-gpios = <&gpio 1 GPIO_ACTIVE_LOW>;}; 那么可以使用下面的函数获得引脚:
struct gpio_desc *red, *green, *blue, *power;red = gpiod_get_index(dev, "led", 0, GPIOD_OUT_HIGH);green = gpiod_get_index(dev, "led", 1, GPIOD_OUT_HIGH);blue = gpiod_get_index(dev, "led", 2, GPIOD_OUT_HIGH);power = gpiod_get(dev, "power", GPIOD_OUT_HIGH);
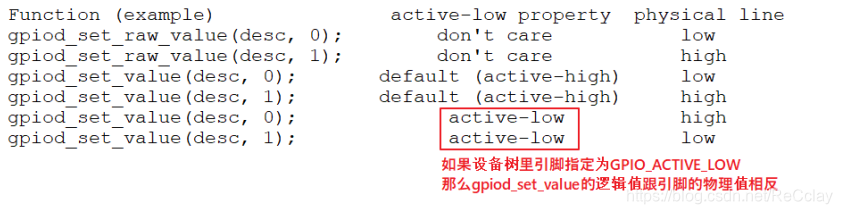
要注意的是, gpiod_set_value 设置的值是“逻辑值”,不一定等于物理值。
什么意思?看下图:
旧的“gpio_”函数没办法根据设备树信息获得引脚,它需要先知道引脚号。引脚号怎么确定?
在 GPIO 子系统中,每注册一个 GPIO Controller 时会确定它的“base number”,那么这个控制器里的第 n 号引脚的号码就是: base number + n。但是如果硬件有变化、设备树有变化,这个 base number 并不能保证是固定的,应该查看 sysfs 来确定 base number。2.4 sysfs 中的访问方法(老的legacy操作方法,不看也罢)
在 sysfs 中访问 GPIO,实际上用的就是引脚号,老的方法(legacy )
- a) 先确定某个 GPIO Controller 的基准引脚号(base number),再计算出某个引脚的号码。方法如下:
- ① 先在开发板的/sys/class/gpio 目录下,找到各个 gpiochipXXX 目录:

- ② 然后进入某个 gpiochip 目录,查看文件 label 的内容
- ③ 根据 label 的内容对比设备树
- label 内容来自设备树,比如它的寄存器基地址。用来跟设备树(dtsi 文件)比较,就可以知道这对应哪一个 GPIO Controller。
- 下图是在 100ask_imx6ull 上运行的结果,通过对比设备树可知 gpiochip96 对应 gpio4:
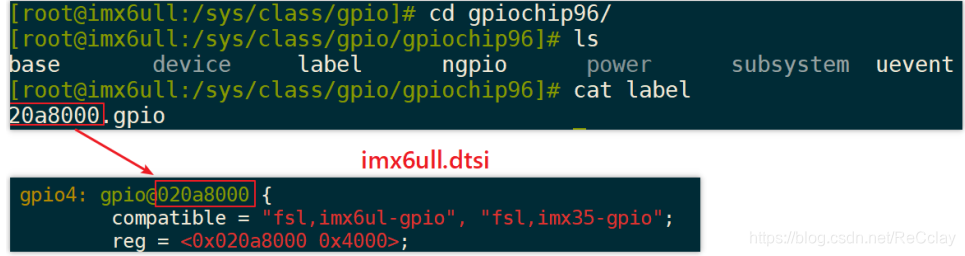
所以 gpio4 这组引脚的基准引脚号就是 96,这也可以“cat base”来再次确认。
- b) 基于 sysfs 操作引脚
- 对于输入引脚,假设引脚号为 N,可以通过如下方法读取引脚值
echo N> /sys/class/gpio/exportecho in > /sys/class/gpio/gpio110/directioncat /sys/class/gpio/gpio110/valueecho N> /sys/class/gpio/unexport
- 对于输出引脚,假设引脚号为 N,可以通过如下方法设置它的值为1:
echo N > /sys/class/gpio/exportecho out > /sys/class/gpio/gpioN/directionecho 1 > /sys/class/gpio/gpioN/valueecho N > /sys/class/gpio/unexport
- 注意:如果驱动程序已经使用了该引脚,那么将会 export 失败,会提示下面的错误:

三、基于 GPIO 子系统的 LED 驱动程序
3.1 编写思路
GPIO 的地位跟其他模块,比如 I2C、 UART 的地方是一样的,要使用某个引脚,需要先把引脚配置为 GPIO 功能,这要使用 Pinctrl 子系统, 只需要在设备树里指定就可以。在驱动代码上不需要我们做任何事情。
GPIO 本身需要确定引脚,这也需要在设备树里指定。设备树节点会被内核转换为 platform_device。对应的, 驱动代码中要注册一个 platform_driver,在 probe 函数中:获得引脚、 注册file_operations。在 file_operations 中: 设置方向、读值/写值。
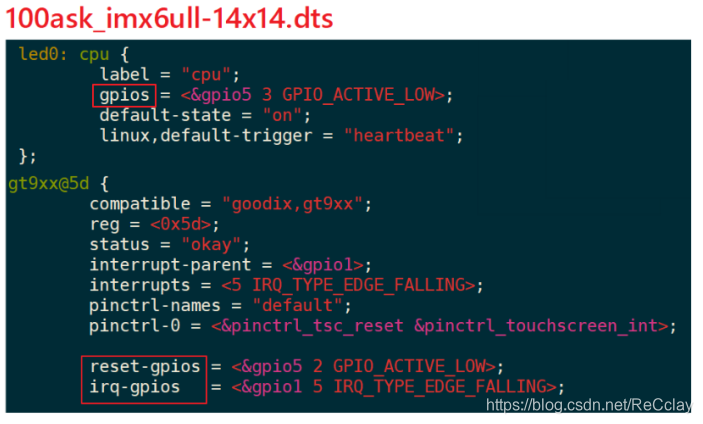
下图就是一个设备树的例子:

3.2 在设备树中添加 Pinctrl 信息
有些芯片提供了设备树生成工具,在 GUI 界面中选择引脚功能和配置信息,就可以自动生成 Pinctrl 子结点。把它复制到你的设备树文件中,再在 client device 结点中引用就可以。
有些芯片只提供文档,那就去阅读文档,一般在内核源码目录:Documentation\devicetree\bindings\pinctrl 下面,保存有该厂家的文档。
如果连文档都没有,那只能参考内核源码中的设备树文件,在内核源码目录arch/arm/boot/dts 目录下。
最后一步, 网络搜索。Pinctrl 子节点的样式如下:

3.3 在设备树中添加 GPIO 信息
先查看电路原理图确定所用引脚,再在设备树中指定:添加”[name]-gpios”属性, 指定使 用 的 是 哪 一 个 GPIO Controller 里 的 哪 一 个 引 脚 , 还 有 其 他 Flag 信 息 , 比 如GPIO_ACTIVE_LOW 等。 具体需要多少个 cell 来描述一个引脚,需要查看设备树中这个 GPIO Controller 节点里的“#gpio-cells”属性值,也可以查看内核文档。
示例如下:
3.4 编程示例
- a. 定义、注册一个 platform_driver
- b. 在它的 probe 函数里:
- b.1 根据 platform_device 的设备树信息确定 GPIO: gpiod_get
- b.2 定义、注册一个 file_operations 结构体
- b.3 在 file_operarions 中使用 GPIO 子系统的函数操作 GPIO: gpiod_direction_output、 gpiod_set_value
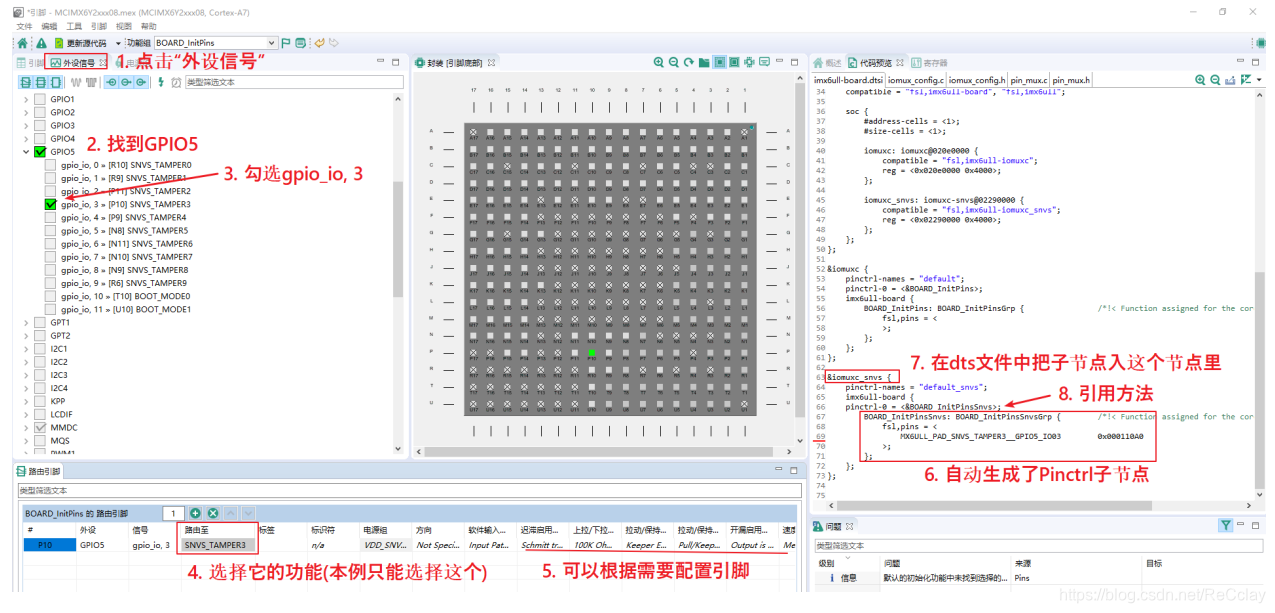
3.4.1、打开I.MX引脚配置工具生成pinctrl
-
选择I.MX6ULL的配置文件(第一次使用需要下载一些东西,最好挂上梯子!)

-
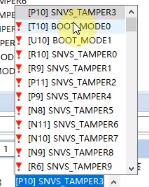
GPIO5_3为例,操作如图所示
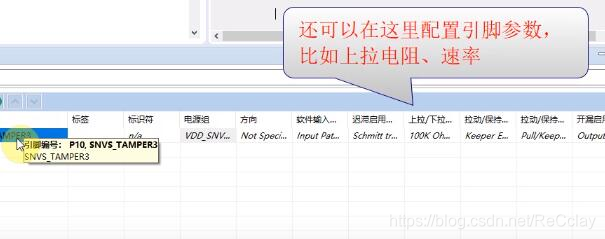
需要说明的:
- A) 图形化操作修改,对应右边的
imx-board.dtsi会有添加相加代码,并且添加的代码用绿色标注出来!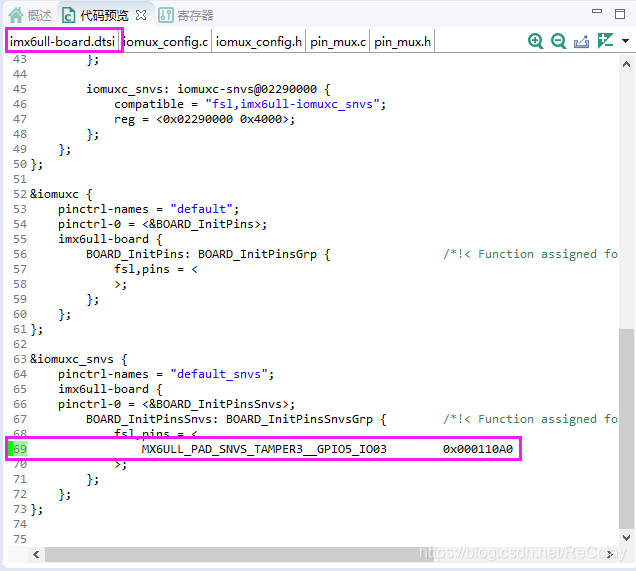
- B) 路由置×××,,,就是复用成×××功能,前面有红色标志的标识选不了
3.4.2、修改设备树文件
-
放置软件生成的pinctrl配置到设备树下
-
打开设备树文件,我的在
/home/clay/linux/IMX6ULL/Linux_Drivers/linux-4.9.88/arch/arm/boot/dts/100ask_imx6ull_qemu.dts -
搜索GPIO5_IO3对应的父节点,即
iomuxc_snvs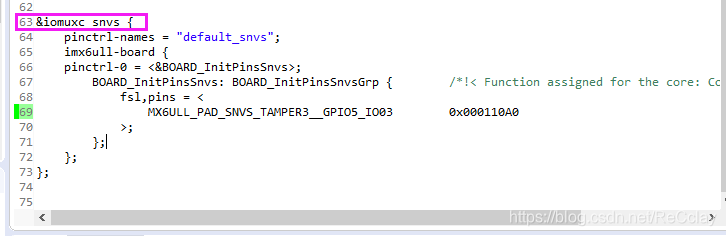
-
复制软件生成的部分代码到该节点下,即
BOARD_InitPinsSnvs: BOARD_InitPinsSnvsGrp { /*!< Function assigned for the core: Cortex-A7[ca7] */ fsl,pins = < MX6ULL_PAD_SNVS_TAMPER3__GPIO5_IO03 0x000110A0 >;}; 
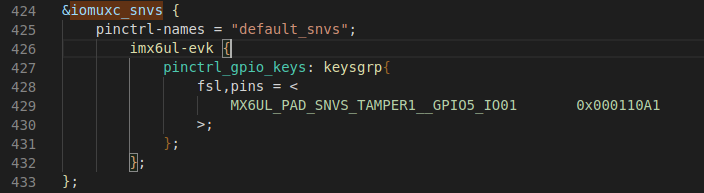
注意,最好放到
imx6ul-evk,这样写比较规范!evk是NXP评估板,显然这个板子的设备树是在原厂板子基础上改来的!印证了那句“天下板子一大抄”!
BOARD_InitPinsSnvs和BOARD_InitPinsSnvsGrp名字可以改成我们想要的(后面要用),比如改成:pinctrl_myled。当然这个名字没有固定要求,但是为了规范,一般会写成pinctrl_xxx: xxxgrp这种形式!

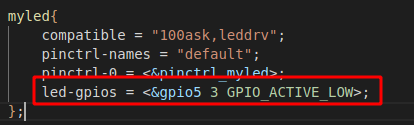
pinctrl_myled: myledgrp { /*!< Function assigned for the core: Cortex-A7[ca7] */ fsl,pins = < MX6ULL_PAD_SNVS_TAMPER3__GPIO5_IO03 0x000110A0 >;}; - 接着在根目录下创建一个子节点!依次加入:
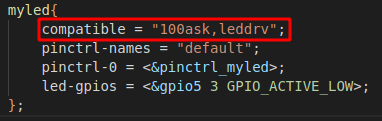
myled{ compatible = "100ask,leddrv"; pinctrl-names = "default"; pinctrl-0 = <&myled_for_gpio_subsys>; led-gpios = <&gpio5 3 GPIO_ACTIVE_LOW>;}; 
需要说明的是:
- A) 在
imx6ull.dtsi文件中,我们可以找到 GPIO5 控制器节点。属性gpio-controller;表示它是一个GPIO控制器,属性#gpio-cells = <2>;表示这个控制器下每一个引脚要用 2 个 32 位的数(cell)来描述(除了第一个参数之外,还需要两个参数描述这个GPIO)。
- B) 设备树的子节点
myled,它的compatible属性取值,要和驱动中的compatible属性名字一样,这样驱动和设备才能匹配!
设备树文件100ask_imx6ull_qemu.dts
 驱动文件
驱动文件leddrv.c 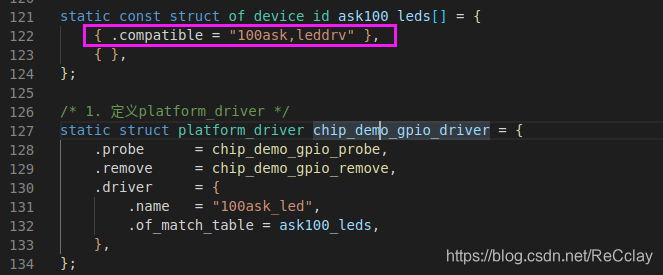
- C) 设备树的子节点
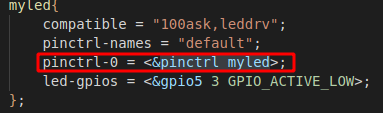
myled,它的pinctrl-0属性取值,是从工具复制过来重命名的pinctrl_myled!
- D) 设备树的子节点
myled,它的led-gpios属性名,要和驱动中的一致!【需要说明的一点,驱动中的名字仅仅是前半部分,比如设备树中是led-gpios,而驱动中只有led】
设备树文件100ask_imx6ull_qemu.dts
 驱动文件
驱动文件leddrv.c 
-
E) GPIO_ACTIVE_LOW 这个有效电平需要根据原理图确定,我们的小灯是低电平点亮,所以有效电平是低!
- on-红-1 off-白-0 低电平有效
-
F) 最后排查一下系统中还有没有其他在使用GPIO_IO3,在设备树中利用工具生成的
MX6ULL_PAD_SNVS_TAMPER3__GPIO5_IO03(该名字是唯一确定)进行搜索即可。
若找到,比如如图所示
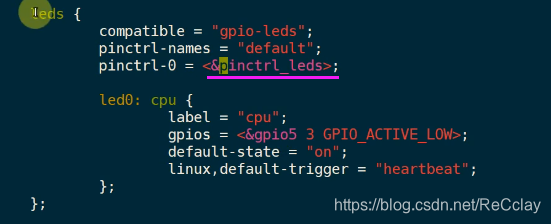
我们可以再搜索
pinctrl_leds找到对应的节点,比如如图所示
我们可以在该节点中加入
status="disabled";,禁止它起作用!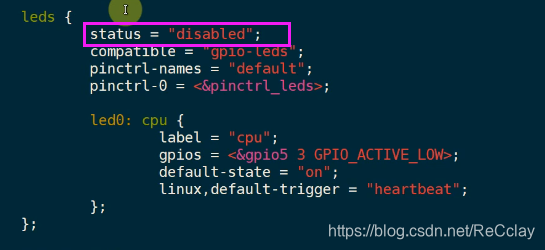

- G) 编译设备树!进入Linux源码目录,我的是
/home/clay/linux/IMX6ULL/Linux_Drivers/linux-4.9.88,然后输入make dtbs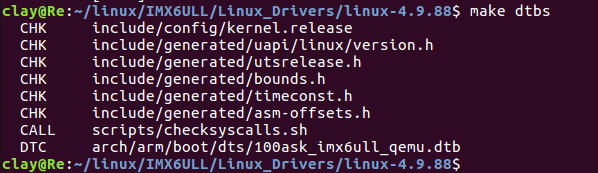
编译没有问题后,复制100ask_imx6ull_qemu.dtb文件到/home/clay/linux/qemu/new/ubuntu-16.04_imx6ul_qemu_system-release/imx6ull-system-image进行覆盖!
3.4.3、编写驱动程序
这个还是老套路了!!!
leddrv.c
#include#include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include /* 1. 确定主设备号 */static int major = 0;static struct class *led_class;static struct gpio_desc *led_gpio;/* 3. 实现对应的open/read/write等函数,填入file_operations结构体 */static ssize_t led_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset){ printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); return 0;}/* write(fd, &val, 1); */static ssize_t led_drv_write (struct file *file, const char __user *buf, size_t size, loff_t *offset){ int err; char status;//这个表示逻辑值 //struct inode *inode = file_inode(file); //int minor = iminor(inode); printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); err = copy_from_user(&status, buf, 1); /* 根据次设备号和status控制LED */ gpiod_set_value(led_gpio, status); return 1;}static int led_drv_open (struct inode *node, struct file *file){ //int minor = iminor(node); printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); /* 根据次设备号初始化LED */ gpiod_direction_output(led_gpio, 0);//这里的1 0 表示逻辑值,因为DTS里面设置了GPIO_ACTIVE_HIGH return 0;}static int led_drv_close (struct inode *node, struct file *file){ printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); return 0;}/* 定义自己的file_operations结构体 */static struct file_operations led_drv = { .owner = THIS_MODULE, .open = led_drv_open, .read = led_drv_read, .write = led_drv_write, .release = led_drv_close,};/* 4. 从platform_device获得GPIO * 把file_operations结构体告诉内核:注册驱动程序 */static int chip_demo_gpio_probe(struct platform_device *pdev){ //int err; printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); /* 4.1 设备树中定义有: led-gpios=<...>; */ led_gpio = gpiod_get(&pdev->dev, "led", 0);//第三个参数为0,表示先不设置引脚! if (IS_ERR(led_gpio)) { dev_err(&pdev->dev, "Failed to get GPIO for led\n"); return PTR_ERR(led_gpio); } /* 4.2 注册file_operations */ major = register_chrdev(0, "100ask_led", &led_drv); /* /dev/led */ led_class = class_create(THIS_MODULE, "100ask_led_class"); if (IS_ERR(led_class)) { printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); unregister_chrdev(major, "led"); gpiod_put(led_gpio); return PTR_ERR(led_class); } device_create(led_class, NULL, MKDEV(major, 0), NULL, "100ask_led%d", 0); /* /dev/100ask_led0 */ return 0; }static int chip_demo_gpio_remove(struct platform_device *pdev){ device_destroy(led_class, MKDEV(major, 0)); class_destroy(led_class); unregister_chrdev(major, "100ask_led"); gpiod_put(led_gpio); return 0;}static const struct of_device_id ask100_leds[] = { { .compatible = "100ask,leddrv" }, { },};/* 1. 定义platform_driver */static struct platform_driver chip_demo_gpio_driver = { .probe = chip_demo_gpio_probe, .remove = chip_demo_gpio_remove, .driver = { .name = "100ask_led", .of_match_table = ask100_leds, },};/* 2. 在入口函数注册platform_driver */static int __init led_init(void){ int err; printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); err = platform_driver_register(&chip_demo_gpio_driver); return err;}/* 3. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数 * 卸载platform_driver */static void __exit led_exit(void){ printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); platform_driver_unregister(&chip_demo_gpio_driver);}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(led_init);module_exit(led_exit);MODULE_LICENSE("GPL");
ledtest.c
#include#include #include #include #include #include /* * ./ledtest /dev/100ask_led0 on * ./ledtest /dev/100ask_led0 off */int main(int argc, char **argv){ int fd; char status; /* 1. 判断参数 */ if (argc != 3) { printf("Usage: %s \n", argv[0]); return -1; } /* 2. 打开文件 */ fd = open(argv[1], O_RDWR); if (fd == -1) { printf("can not open file %s\n", argv[1]); return -1; } /* 3. 写文件 */ if (0 == strcmp(argv[2], "on")) { status = 1; write(fd, &status, 1); } else { status = 0; write(fd, &status, 1); } close(fd); return 0;}
Makefile
KERN_DIR = /home/clay/linux/IMX6ULL/Linux_Drivers/linux-4.9.88# 板子所用内核源码的目录all: make -C $(KERN_DIR) M=`pwd` modules $(CROSS_COMPILE)gcc -o ledtest ledtest.c clean: make -C $(KERN_DIR) M=`pwd` modules clean rm -rf modules.order rm -f ledtest obj-m += leddrv.o
四、运行程序
编译程序没有问题后,运行qemu虚拟开发板,并做好准备工作!将
- 拷贝led.ko和ledtest到NFS中
cp *.ko ledtest ~/linux/qemu/NFS/
- 在qemu终端,加载led.ko文件
insmod led.ko
在qemu中加载最后一个模块时,会出现下面的提示信息,但是ctrl+c之后,似乎测试还是可以用的,不知道是怎么回事。知道的朋友,可以在下面留言一起探讨!

- 在qemu终端,运行应用程序打开LED0
./ledtest /dev/100ask_led0 on

- 在qemu终端,运行应用程序关闭LED0
./ledtest /dev/100ask_led0 off
大功告成,点亮一个LED系列终于完结!哈哈哈~
转载地址:http://kbnaf.baihongyu.com/